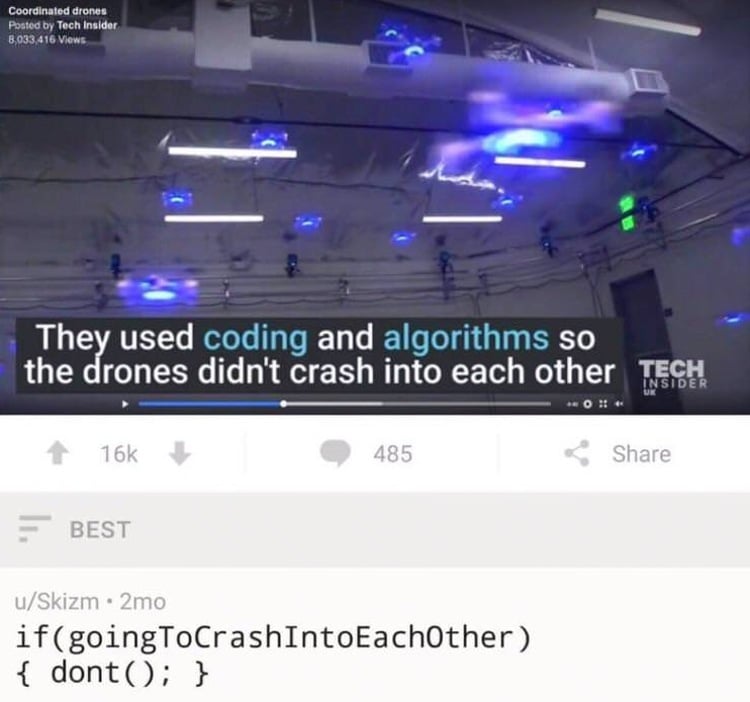
Well, even at that level of abstraction, it’s a bit weird, because goingToCrashIntoEachOther and dont() both need the information from where a collision is going to take place, so you’d expect something to be passed into dont().
Well, and it’s easy to dismiss this stuff as implementation details, but that if-statement needs to run as part of a loop. This loop should probably be on a separate thread, so it doesn’t get blocked by other stuff going on. Which means access to the motors needs to be behind some form of mutex, which it needs to be able to acquire fairly quickly. And then, yeah, those implementation details quickly add up to become the part that’s actually complex.


{kind=link}
Well, even at that level of abstraction, it’s a bit weird, because
goingToCrashIntoEachOtheranddont()both need the information from where a collision is going to take place, so you’d expect something to be passed intodont().Well, and it’s easy to dismiss this stuff as implementation details, but that if-statement needs to run as part of a loop. This loop should probably be on a separate thread, so it doesn’t get blocked by other stuff going on. Which means access to the motors needs to be behind some form of mutex, which it needs to be able to acquire fairly quickly. And then, yeah, those implementation details quickly add up to become the part that’s actually complex.